The ME - 250 course gave me an inspiring glimpse into the significance of the manufacturing and design processes involved in mechanical engineering. The course provided me with a toolbox full of skills and additional methods to utilize during the design process. The processes I must utilize to make good decisions, discussions, ideas, planning, scheduling, and execution were valuable. I learned to utilize Pugh, FRDPARRC charts; it is now common practice for me to organize my goals in terms of strategies, concepts, and modules. I learned to use the CES EduPack for information to help with material selection. I learned how varieties of mechanical components work as well as how to utilize them properly in applications. I learned the importance of safety and in all aspects of engineering and design, but most importantly in respects to the end user. As the design process progressed in the course, emphasis was placed on manufacturing, and design for manufacturing. Creating BOMs, shop prints, solid models, process sheets, purchasing, scheduling, and meeting deadlines were all very important real world experiences that I have gained from the course, and I am better prepared to tackle other problems that I will encounter in the field of engineering.
When it comes to teamwork, I learned that the one of the most important parts of teamwork is organization. Organization is the key to success because the result of good organization is good execution. A good team must be organized and informed so that they can bring forth ideas on a unified front during planning. More important than that is the responsibility of an individual to be a good teammate. I learned that a good teammate will demonstrate unselfishness as a quality trait. A good teammate is proactive and goes above and beyond that which is required of them. A good teammate is optimistic, motivational, and sets an example for his team. I was reminded of how quickly deadlines can approach, and things can go wrong but if a team is prepared, and have planned their map to success appropriately then theses road bump will not deter them from their path. The best team is a made of leaders that use their strengths to empower their teammates. Those teams stand on the cutting edge and present sharp ideas at every turn.
The course was very thorough in the material that it presented. I have prior experience in the field of manufacturing engineering, machining and the lectures were good reinforcement for me. One improvement I would like to see in the course is a longer lead-time to present the finished part. Our team was reluctant to find all time we needed to machine and assembly our bot. When we returned from the break all of the machines slots were full, but some of us “camped out” in the shop until a machine was made available for us to use; however this came at the sacrifice of missing other classes. Another thing that would help improve the course is more real-time access to the grades and GSIs. Perhaps using the Gradebook and Schedule modules on CTools would help.
My performance in this course could have definitely been a lot better. My grades on HW-1 and 2 were not the greatest and I should have put more time into those assignments. In addition, I think that our machine performance could have improved significantly if we had gotten our parts shipped earlier. Our major breakdown came when it was time to control the bot, and getting those parts in earlier would have allowed us to finish early and get a better understand of how our bot responds to the controller.
Regards,
Fred
Monday, December 13, 2010
Sunday, December 12, 2010
Individual Reflection: Jasdeep Khabra
ME 250 was the first class to have really challenged me in my capabilities to think outside the box. As an engineer solutions do not appear in books and on the internet but more from the creativity in the right side of your brain. Conditioning your mind to take a certain path, however illogical can sometimes produce the most effective strategies that one would not have thought otherwise. I believe this is the most fundamental learning experience of the class. Aside from this, basic machining, time management and teamwork were essential skill sets learned that are applicable to the real world today.
The design process itself is one of the most useful tools in today’s manufacturing world. It is a step-by-step process, which funnels not only your creativity but also your focus, taking into account several factors such as time, cost, and the fundamental design principles. Following the design process meticulously can save you from disaster, because design is the initial step and determines the rest of the project as it impacts product cost the most.
Teamwork and time management are essential to survival in the workplace. Your ability to function as a team member can lead to the success or failure of the entire team. In the workplace, rarely will you work as an independent party, but as a group with your peers. The ability to function cohesively as a group will make your team obtain the assigned goal with maximum efficiency and accuracy. Thus, the better you are as a team member, the more productive your input is to the overall effort. Time management functions in a similar manner and ineffective use can heavily impact the efficiency of group work. A structured plan, as well as making sure all team members are on the same page can effectively streamline the process of achieving required goals.
The skills learned in the machine shop were especially useful. Understanding how the lathe and mill worked sparked inspiration as to what could be done to solve a particular problem. The machining experience reinforced ideals of design as well as taught us manufacturing principles like, “measure twice, cut once.”
This course was a great experience however, was sometimes frustrating. It wasn’t the degree of difficulty, but the availability to work in the shop. It is difficult with our busy schedules to have to sign up and fight over machine times. Having the other shops open and more available would have really helped in completing this project. Also, each team getting their own power supply, charger and controller would have also helped in tweaking the functionality of our machines. The trim on left stick of the controller was different than the right stick and this posed a serious problem for our team, as the trim for one motor was different than the other.
This was the first class that really tested my knowledge of CAD software and the elements of design. I could have improved my performance in this class by being more prepared and efficient when it came to group meetings and assignments.
Individual Reflection: Roman Novitski
ME250 was a great experience for multiple reasons, probably the main one being able to get into the shop and work on projects hands on, as opposed to a theoretical class. The ability to learn to use the mill, lathe, and other instruments will definitely come in useful not only in future classes but in life as well. Although, this part of the class was simultaneously the worst as well. The amount of red tape and guidelines and timetables to work around was detrimental to the progress of our bot. It was difficult to get the majority of the group together during one timeslot, groups were signing up for slots they didn’t use, and there was not enough time overall to work in the shop. Towards the end of the project, I found myself, as well as my group members, skipping all our morning classes, working from opening hours of the shop until 4 or 5pm. No matter how much time is spent making a CAD of the bot, the real problems don’t arise until the team is able to get into the shop and create the needed parts. If the class was able to get into the shop earlier in the semester and start work, I think the quality of the bots would have improved greatly.
The lecture part of the class seemed somewhat irrelevant. Sure it was interesting to learn about the different types of bearings, springs, machining specs, and CAD guidelines, and no doubt this will come in useful as an ME major, less time could have been spent learning about equations and calculations. I don’t think there was one time where calculations came in useful during our bot assembly, except for assignments. Sounds a bit naïve, but there are just so many constraints to take into account, there are generally no useful accurate approximations or estimations that could be made. As I said above, I’d like to emphasize the need to get into the lab as soon as possible and actually test these constraints as to get a feel for them as opposed to just having theoretical numbers.
I feel as though I’ve gotten a better grasp on time and team management skills. This class definitely presented a real challenge of working together with the whole team, especially having assignments due just a few days apart and all the restrictions put upon shop hours. No matter, we learned to work with what we had, and were fairly content as a team at our finished product. There is still a general consensus that this course had a lot of material and not enough time.
I’d like to make one final note about the remote controller trim. If there is a way to disable this function on the controller, or have it permanently calibrated, this would save a lot of frustration for future teams. I believe this was singlehandedly the reason our bot didn’t move on competition day.
Overall, ME250 was a great learning experience and I’m happy about our team’s design and execution. I had a great time working with CAD, the machine shop, and my team members. Best of luck to future teams!
-Roman Novitski
Individual Reflection: Joe Martoglio
In this class, I learned many topics that were taught in class, such as how to create drawings and how to use a lathe and mill, as well as important skills that can only be learned through experience, such as how to work well with a team and the importance of the fundamental design principles. This class was my first experience in a machine shop, so the training on the lathe, mill, and laser cutter was very useful. It was also my first experience using Solid Works.
The class also showed the importance of the fundamental design principles. We saw how the propagation of errors could result in pieces not aligning correctly. Also I learned that it is important to keep a design simple. Early in the semester many of the ideas were extremely complex and difficult to implement. As people began machining they realized that they would not be able to create their bots and switched to more simple approaches. Also many groups struggled to get their bots to work and the groups with simple design were able to create more affective bots.
We could have made our bot more simple by using wheels instead of treads. This would have allowed the bot to move with less force from the motors. Also, the door was not necessary because it was only needed to capture balls on the edge of the table; however if we were only able to capture balls in the middle of the table our bot still would have done well in the competition. Without the door, we could have used all four motors to move the bot which would have allowed it to move quickly and likely be successful in overcoming the center barrier.
Having the machine shop open more hours and late at night would significantly improve this class. Also the class could be improved by limiting other assignments to allow us to focus more on the machine. If earlier home works and the bike lab were not given then we could have started working on the bot earlier in the semester and spent more time on it. Also lectures covered too many topics, and some were not explained sufficiently. For example stresses and strain and Saint Venant's principle were talked about very quickly, but were not really needed in the construction of the bot.
I could have improved my performance in the class by starting assignment earlier. Right when the machine shop opened it was less crowded because there were not any deadlines that week. That would have been a good time to work on the bot, and would have allowed us to finish early enough to practice and make more modifications.
-Joe Martoglio
Final Machine Post

During the semester we made many changes to the design of the bot. We changed the way the door functioned. First we had planned to raise and lower it similar to how garage doors work. Instead we decided to attach it to a shaft and have it rotate. This was a more simple way to raise the door quickly and was less difficult to machine. In the final bot the door was able to move open and close quickly. Also we decided not to use an arm on the bot because that would make it more difficult to fit inside the size restriction.
During the competition the bot struggled moving. The motors provided little force forward and the bot could not travel straight. This may have occurred because the trim on the controller was off, so forces in each direction were not equal. Also the treads required a strong force to move the bot. We may have been better off with wheels which could have moved the bot more easily because there would be less rolling friction. When deciding to use a tread system we should have paid more attention to the strength of the motors since the motors are relatively weak compared to the force required to move a robust bot with treads.
In the seeding round the bot was able to move, but it could not get over the white barrier in the center of the table. This occurred because the tread got stuck on a ball. We did not anticipate this problem, and were not able to find a solution during the seeding round.
In the seeding round the bot was able to move, but it could not get over the white barrier in the center of the table. This occurred because the tread got stuck on a ball. We did not anticipate this problem, and were not able to find a solution during the seeding round.
Our final machine had many positive attributes. It was very robust and was more simple than many other machines. In the seeding round the bot was able to move quickly and likely would have done well if it could get over the barrier.
-Tri-State Warriors
Video our our round at the competition is located at http://www.youtube.com/watch?v=9YRVHWqlsDU
Here is a link to the final bill of materials: https://docs.google.com/document/d/12s-j9ciNhDiJuobAOVqdtsUDNTTfotrIVNf7en1Q33w/edit?hl=en&pli=1#
Wednesday, December 8, 2010
Intro Video
Hello,
This is the youtube link of our intro video.
Enjoy.
http://www.youtube.com/watch?v=PpO00dLPi1g
Saturday, December 4, 2010
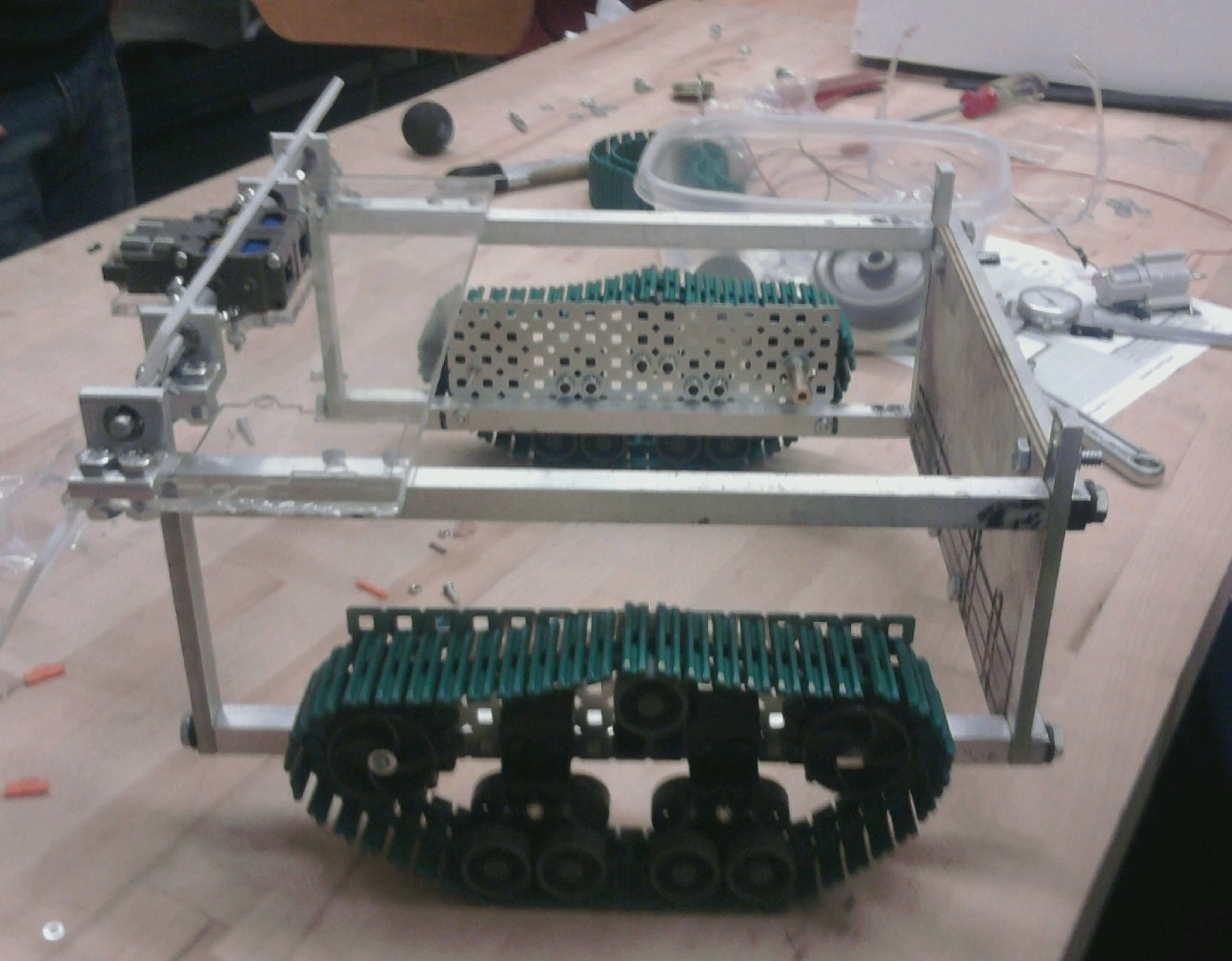
Update- Assembly
This week our team continued machining parts and began assembling them. Now the bot is nearly complete. It has a working door, and the frame of the bot is complete. The treads that we ordered came, and we assembled them and attached them to the bot. Also we cut a piece of wood to be attached to the back of the bot that will hold the motors that move the treads. We chose wood because it is lightweight and easy to cut and drill into.
On Monday we will attach netting to the side of the bot which will prevent balls from rolling out. Also we will create an arm out of delrin, which will be used to capture balls.
After assembly we noticed that the door did not reach low enough to block balls. This occurred because the treads raised the machine up more than we expected. To fix this problem we will attach another piece of delrin to the bottom of the door. Shown below are pictures of what we have assembled.

Tuesday, November 30, 2010
Update- MCM

Many parts of this module were machined with low tolerances, so that they would align correctly. For example the hole in the pillow block should have been reamed, so that the bearing would press fit into it. Also the shaft had to be the correct diameter, so that it would press fit into the bearings.
Here is a link to the updated team schedule: https://spreadsheets.google.com/pub?key=0AglbbLMb_1RRdFA0TGxPU2VZTTNsdjB5emdPaUpONnc&hl=en&single=true&gid=0&output=html
Friday, November 19, 2010
Update- Machining
This week our team starting machining. On Monday we used the water jet to cut out rectangular pieces that will be assembled to create the frame of our bot. We used a .25" thick aluminum plate. This differs from our original plan to use a .5" thick plate. A large enough .5" thick plate was not available to us and the thinner plate will allow the bot to be lighter and move faster. Aluminum is a good material to use for our frame because it is strong and less dense than other metals such as steel.
On Thursday we used the mill to drill holes in the pieces that we cut out. Also we used the saw to cut the angle stock into smaller pieces. These pieces will be used as pillow blocks. Today we will use the mill to drill the holes in the pillow blocks.
-Tri-State Warriors
Saturday, November 13, 2010
New Door Update
After completing the motor lab and having heard all the lectures our team decided that the most simple approach to lifting our door is to make it as light as possible and connecting it directly to the double gearbox motor. Tomorrow we plan to have our solid model 85 - 100% complete, and as we review for our Exam we will also use that opportunity to ensure that we applied all of the fundamental design principles to our bot. Manufacturing will begin early next week as well. Our new design is illustrated in the images below. Please feel free to leave comments or suggestions.
Thanks,
Tri-State Warriors




Thanks,
Tri-State Warriors




Saturday, November 6, 2010
UPDATE
Hello, we been discussing the most effective method of execution with respect to our Most Critical Module. We have decided to implement a rack and pinion design. As we continue to work on our MS6 homework assignment we are making final decisions as to materials and dimensions.
We discussed the Bill of Materials and Manufacturing Plan. This allowed us to pick and choose specific parts and materials that will be utilized for our design. By completing this assignment we were able to gain a better understanding of what our design will simulate.
-Tri-State Warriors
Thursday, October 28, 2010
Tri-State Warriors' Team Schedule
Please go to goo.gl/ExQy to view our team's schedule from now until the competition!
Welcome to the ME250 Tri-State Warriors' Blog
Hello, and thank you for visiting our team blog. Please visit us at least once a week so that you can follow our progress through our weekly postings. Our team is excited about having the opportunity to compete with other students in the Slotbots II competition during the Fall 2010 Semester at the University of Michigan Ann Arbor. Our team has done a lot of planning and brainstorming as we have tried to develop a strategy and concept that will ultimately lead to victory in the tournament.
Our strategy is focused around playing on the table-top. Our team chose to go in this direction because by doing so we can essentially gather more mass on one-half of the table than an opposing team can obtain by playing the slot. Furthermore, a Pugh Chart analysis with two other strategies verified that playing on the table-top was found to be our best option. And so the challenge of choosing a concept began
For the concept we tried to model our ideas after real world applications that are used to perform task similar to what we need to do in the arena; a few examples of such are the Hungry Hungry Hippo Game, golf ball collectors at the driving range, etc. and the following are what we decided to use. Our team designed a car that captures balls on top of the table and pushes them to the funnel. Our machine has a door that drops to trap balls in the machine housing. Using a door allows us to get balls on edges without the risk of them falling over the edge of the arena. Also our car moves with treads instead of wheels so that we can effectively turn on the field and overcome obstacles.
For your convenience we have uploaded three photos of our preliminary machine concept. The first two pictures show the up and down positions of our door, and the last is an exploded view of our assembly. Please feel free to leave us comments or suggestions.
Tri-State Warriors



Subscribe to:
Comments (Atom)